洞察物理世界,开启具身通用智能
以人类学习之路,让机器人真正走进物理世界
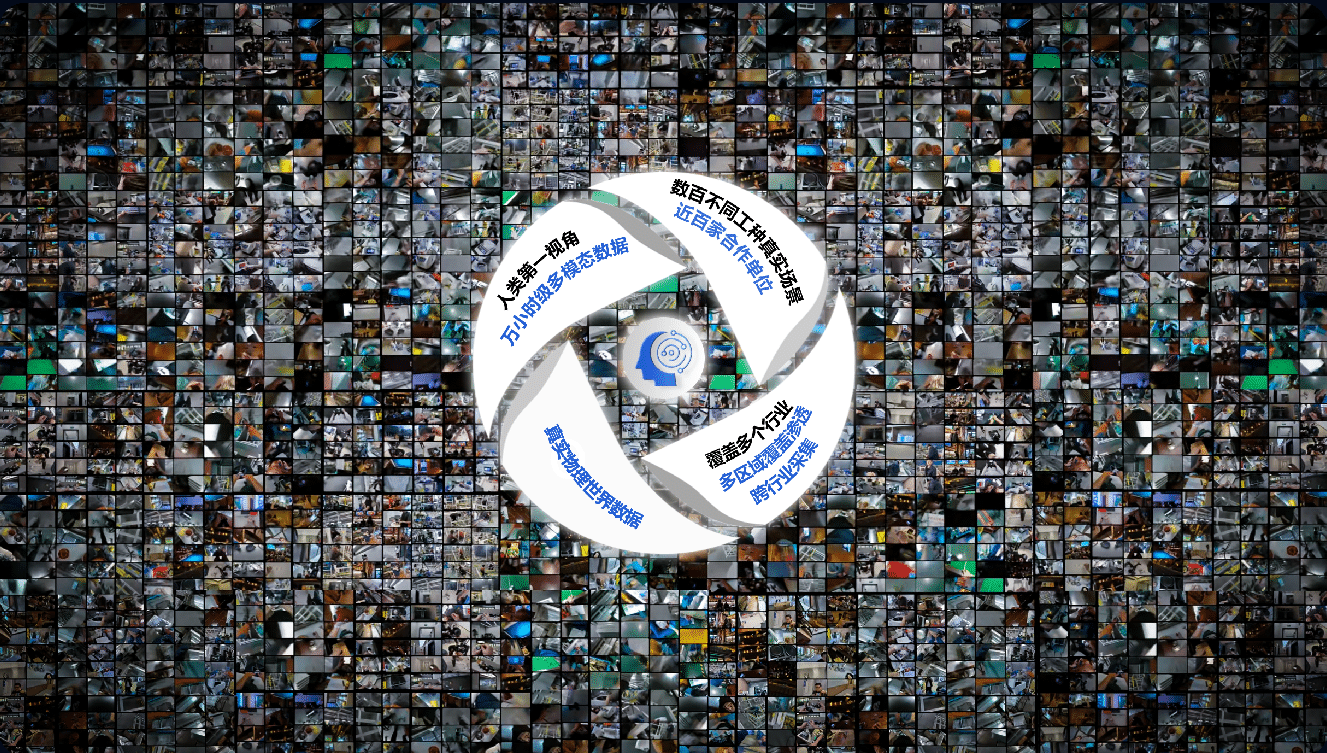
人类数据为基
首创情景数采,以“情境标签”承载场景背景与交互逻辑,让机器从人类经验中习得物理常识。
先理解 后行动
重新定义具身智能数据新范式、架构新范式、训练新范式,构建通用物理智能基座模型。
定义下一代具身载体
以大模型的决策需求重构机器躯体,从控制到硬件,让智能高效落地物理世界。
洞察物理世界,开启具身通用智能
以人类学习之路,让机器人真正走进物理世界
人类数据为基
首创情景数采,以“情境标签”承载场景背景与交互逻辑,让机器从人类经验中习得物理常识。
先理解 后行动
重新定义具身智能数据新范式、架构新范式、训练新范式,构建通用物理智能基座模型。
定义下一代具身载体
以大模型的决策需求重构机器躯体,从控制到硬件,让智能高效落地物理世界。